import matplotlib
if not hasattr(matplotlib.RcParams, "_get"):
matplotlib.RcParams._get = dict.get
Components of time series#
Introduction#
The four components of time series, we consider here, are the trend, seasonality, offset, and noise (white/colored). The observation equation of a time series with these four components is represented by:
where
\(y_0 \): intercept (e.g. in mm).
\(r\): is the rate (e.g. in mm/year).
\(a\) and \(b\) are the coefficients of the periodic cycle.
\(f_1\) is the frequency of the seasonal component (e.g. 1 cycle/year).
\(o\) is the size of the offset at time instant \(t_k\).
\(u_k(t)\) is the unit step function, which is 1 if \(t_k \leq t\), and 0 otherwise.
\(\epsilon(t)\) is the zero mean random noise with a given variance which presumably follows a Normal distribution: \( \epsilon(t) \sim N(0, \sigma_{\epsilon}^2)\).
Here, we assume there is only a single periodic harmonic and one offset component. However, in many practical scenarios, there could be multiple such components.
Exercise#
In this exercise we will create a time series containing the four components previously described. At each step we will add a new component to the time series. You can copy and use the code provided below to change the input variables and see how the plots of the genereated time series changes.
The noise follows a normal distribution: use np.random.normal in order to draw random samples from a normal (Gaussian) distribution. Study more on this function here.
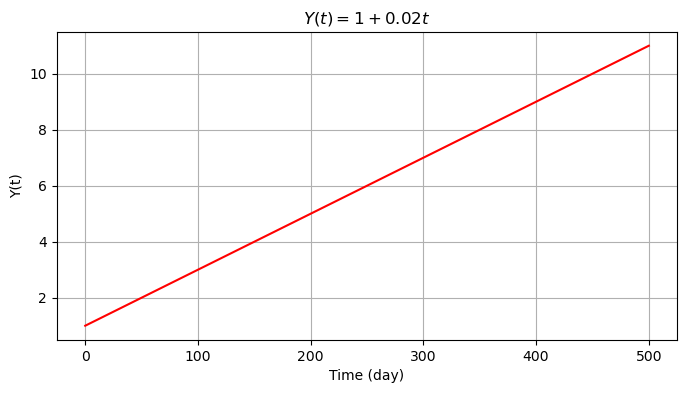
We will first create the time series \(Y(t)=y_0+rt\), with \(y_0=1\) mm and \(r=0.02\) mm/day with a duration of 500 days (i.e., time series consists of 500 observations, one observation per day).
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
np.random.seed(0) # For reproducibility
time = np.arange(501)
m = len(time)
y_0 = 1
r = 0.02
y1 = y_0 + r*time
plt.figure(figsize=(8,4))
plt.grid()
plt.plot(time, y1, color='red')
plt.ylabel('Y(t)')
plt.xlabel('Time (day)')
plt.title('$Y(t) = 1 + 0.02 t $');
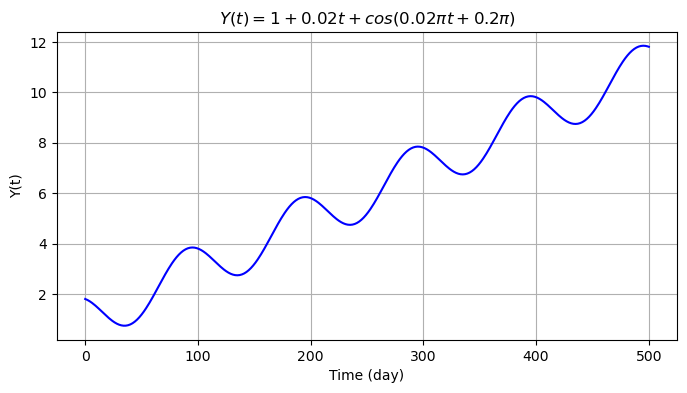
We then introduce seasonality to the data with a cosine signal \(s(t)=A \cos(2\pi f_1 t + \theta)\) with frequency \(f_1=0.01\) cycle/day (i.e., 1 cycle per 100 days), amplitude \(A=1\) mm and initial phase \(\theta=0.2\pi\) rad.
f_1 = 0.01
A = 1
theta = 0.2*np.pi
y2 = y1 + A*np.cos(2 * np.pi*f_1 * time + theta)
plt.figure(figsize=(8,4))
plt.grid()
plt.plot(time, y2, color='blue')
plt.ylabel('Y(t)')
plt.xlabel('Time (day)')
plt.title('$Y(t) = 1 + 0.02 t + cos(0.02πt + 0.2π)$');
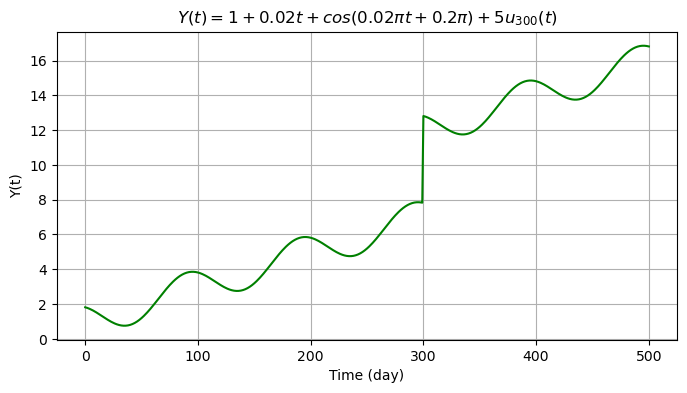
We now add an offset \(o_k=5\) at \(t=300\) days. We therefore create a copy of the previous signal and store it into a new array.
t_k = 300
O_k = 5
y3 = y2.copy()
y3[t_k:] = y3[t_k:] + O_k
plt.figure(figsize=(8,4))
plt.grid()
plt.plot(time, y3, color='g')
plt.ylabel('Y(t)')
plt.xlabel('Time (day)')
plt.title('$Y(t) = 1 + 0.02 t + cos(0.02πt + 0.2π) + 5 u_{300}(t)$');
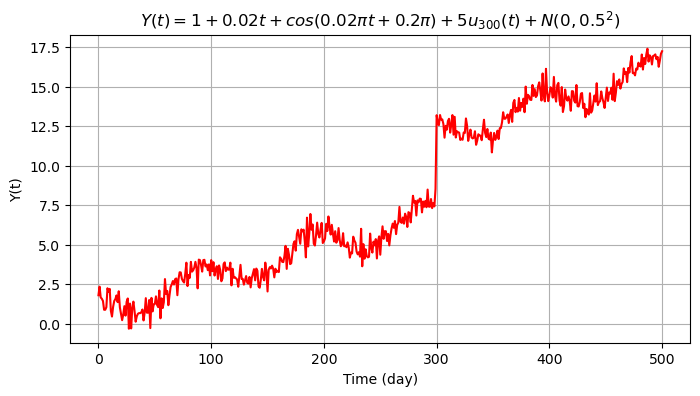
Eventually we include the random error \(\epsilon \sim N(\mu, \sigma^2_{\epsilon})\) with \(\mu=0\) mm and \(\sigma_{\epsilon}=0.5\) mm (500 i.i.d. samples).
mean = 0
sigma = 0.5
et = np.random.normal(loc = mean, scale = sigma, size = m)
y4 = y3 + et
plt.figure(figsize=(8,4))
plt.grid()
plt.plot(time, y4, color='red')
plt.ylabel('Y(t)')
plt.xlabel('Time (day)')
plt.title('$Y(t) = 1 + 0.02 t + cos(0.02πt + 0.2π) + 5 u_{300}(t) + N(0,0.5^2)$');
Attribution
This chapter was written by Alireza Amiri-Simkooei, Christiaan Tiberius and Sandra Verhagen. Find out more here.