In the book, the finite element derivation and implementation of rod extension (the 1D Poisson equation) is presented. In this workshop, you are asked to do the same for a slightly different problem.
Part 1: A modification to the PDE: continuous elastic support¶
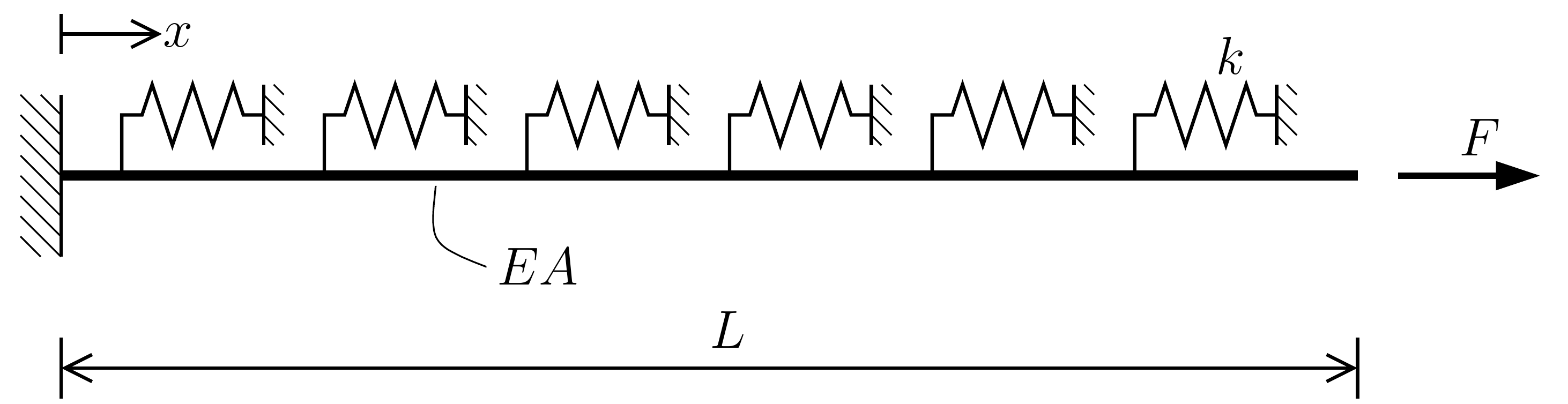
For this exercise we still consider a 1D rod. However, now the rod is elastically supported. An example of this would be a foundation pile in soil.
The problem of an elastically supported rod can be described with the following differential equation:
$$ -EA \frac{\partial^2 u}{\partial x^2} + ku = f $$with:
$$ u = 0, \quad \text{at} \quad x = 0 \\ EA\frac{\partial u}{{\partial x}} = F, \quad \text{at} \quad x = L $$This differential equation is the inhomogeneous Helmholtz equation, which also has applications in dynamics and electromagnetics. The additional term with respect to the case without elastic support is the second term on the left hand side: $ku$.
The finite element discretized version of this PDE can be obtained following the same steps as shown for the unsupported rod in the book. Note that there are no derivatives in the $ku$ which means that integration by parts does not need to be applied on this term. Using Neumann boundary condition (i.e. an applied load) at $x=L$ and a constant distributed load $f(x)=q$, the following expression is found for the discretized form:
$$\left[\int \mathbf{B}^T EA \mathbf{B} + \mathbf{N}^T k \mathbf{N} \,dx\right]\mathbf{u} = \int \mathbf{N}^T q \,d x + \mathbf{N}^T F \Bigg|_{x=L} $$Task 1: Derive the discrete form
Derive the discrete form of the PDE given above. You can follow the same steps as in the book for the term with $EA$ and the right hand side, but now carrying along the additional term $ku$ from the PDE. Show that this term leads to the $\int\mathbf{N}^Tk\mathbf{N}\,dx$ term in the $\mathbf{K}$-matrix.
Solution
Including the additional term resulting from the distributed spring $ku$, the following differential equation is obtained:
$$-EA \frac{\partial^{2} u}{{\partial x}^{2}} + ku = f$$The differential equation is rewritten in the weak form by multiplying both sides of the equations by the weight function $w(x)$ and integrating over the domain.
$$ -\int_{0}^{L} wEA \frac{\partial^{2} u}{\partial x^{2}}\,dx + \int_0^Lwku\,dx = \int_0^Lwf\,dx \quad\forall\quad w$$Integration by parts is applied, but only to the $EA$-term. Neumann boundary conditions are subsdstituted in the boundary term that arises from integration by parts:
$$ \int_{0}^{L} \frac{\partial{w}}{\partial u}EA \frac{\partial u}{\partial u}\,dx + \int_0^Lwku\,dx = \int_0^Lwf\,dx+w(L)F \quad\forall\quad w$$Next, we discretize the displacement and weight functions:
$$ u^h(x) = \mathbf{Nu} $$$$ w^h(x) = \mathbf{Nw} $$We substitute the discretized solution $u^h$ and the discretized weight function $w^h$ into the weak form equation. Since the equation has to hold for all $w$, the term for the distributed spring becomes:
$$ \int_{0}^{L} \mathbf{Bw}EA \mathbf{Bu}+\mathbf{Nw}k\mathbf{Nu}\,dx = \int_0^L \mathbf{Nw}f\,dx+\mathbf{N}(L)\mathbf{w}F $$We take $\mathbf{u}$ and $\mathbf{w}$ out of the integral and eliminiate $\mathbf{w}$ to get the expression given above (just before the green box in Task 1).
Part 2: Modification to the FE implementation¶
The only change with respect to the procedure as implemented in the book is the formulation of the $\mathbf{K}$-matrix, which now consists of two terms:
$$ \mathbf{K} = \int \mathbf{B}^TEA\mathbf{B} + \mathbf{N}^Tk\mathbf{N}\,dx $$To calculate the integral exactly we must use two integration points.
$$ \mathbf{K_e} = \sum_{i=1}^{n_\mathrm{ip}} \left(\mathbf{B}^T(x_i)EA\mathbf{B}(x_i) + \mathbf{N}^T(x_i) k\mathbf{N}(x_i) \right) w_i$$Task 2: Code implementation
The only change needed with respect to the implementation of the book is in the calculation of the element stiffness matrix. Copy the code from the book and add the term related to the distributed support in the right position.
Use the following parameters: $L=3\text{ m}$, $EA=1000\text{ N}$, $F=10\text{ N}$, $q=0 \text{ N/m}$ (all values are the same as in the book, except for $q$). Additionally, use $k=1000\text{ N/m}^2$.
Remarks:
- The function
evaluate_Nis already present in the code in the book - The
get_element_matrixfunction already included a loop over two integration points - You need to define $k$ somewhere. To allow for varying $k$ as required below, it is convenient to make $k$ a second argument of the
simulatefunction and pass it on to lower level functions from there (cf. how $EA$ is passed on)
Check the influence of the distributed support on the solution:
- First use $q=0$ N/m and $k=1000$ N/$mm^2$
- Then set $k$ to zero and compare the results
- Does the influence of the supported spring on the solution make sense?
Solution: all comments from the original code have been removed, and changes to the original code are marked with comments.
def evaluate_N(x_local, dx):
return np.array([[1-x_local/dx, x_local/dx]])
def evaluate_B(x_local, dx):
return np.array([[-1/dx, 1/dx]])
def get_element_matrix(EA, k, dx): # pass on k
integration_locations = [(dx - dx/(3**0.5))/2, (dx + dx/(3**0.5))/2]
integration_weights = [dx/2, dx/2]
n_ip = len(integration_weights)
n_node = 2
K_loc = np.zeros((n_node,n_node))
for x_ip, w_ip in zip(integration_locations, integration_weights):
B = evaluate_B(x_ip, dx)
N = evaluate_N(x_ip,dx) # new line
K_loc += EA*np.dot(np.transpose(B), B)*w_ip
K_loc += k*np.dot(np.transpose(N), N)*w_ip # new line
return K_loc
def get_element_force(q, dx):
n_node = 2
N = np.zeros((1,n_node))
integration_locations = [(dx - dx/(3**0.5))/2, (dx + dx/(3**0.5))/2]
integration_weights = [dx/2, dx/2]
f_loc = np.zeros((n_node,1))
for x_ip, w_ip in zip(integration_locations, integration_weights):
N = evaluate_N(x_ip,dx)
f_loc += np.transpose(N)*q*w_ip
return f_loc
def get_nodes_for_element(ie):
return np.array([ie,ie+1])
def assemble_global_K(rod_length, n_el, k, EA): # pass on k
n_DOF = n_el+1
dx = rod_length/n_el
K_global = np.zeros((n_DOF, n_DOF))
for i in range(n_el):
elnodes = get_nodes_for_element(i)
K_global[np.ix_(elnodes,elnodes)] += get_element_matrix(EA, k, dx) # pass on k
return K_global
def assemble_global_f(rod_length, n_el, q):
n_DOF = n_el+1
dx = rod_length/n_el
f_global = np.zeros((n_DOF,1))
for i in range(n_el):
elnodes = get_nodes_for_element(i)
f_global[elnodes] += get_element_force(q, dx)
return np.squeeze(f_global)
def simulate(n_element,k): # add k as argument
length = 3
EA = 1e3
n_node = n_element + 1
F_right = 10
u_left = 0
q_load = 0 # value changed
dx = length/n_element
x = np.linspace(0,length,n_node)
K = assemble_global_K(length, n_element, k, EA) # pass on k
f = assemble_global_f(length, n_element, q_load)
f[n_node-1] += F_right
u = np.zeros(n_node)
f -= K[0,:] * u_left
K_inv = np.linalg.inv(K[1:n_node, 1:n_node])
u[1:n_node] = np.dot(K_inv, f[1:n_node])
u[0] = u_left
return x, u
import numpy as np
import matplotlib.pyplot as plt
x10, u_with_k = simulate(10,1000)
x10, u_without_k = simulate(10,0)
plt.figure()
plt.plot(x10, u_with_k, label='k=1000')
plt.plot(x10, u_without_k, label='k=0')
plt.xlabel('x')
plt.ylabel('u')
plt.legend();
As can be observed in the plot, with $k=0$, the solution is a straight line (linear displacement along the axis of the pile). With $k=1000 N/m^2$, the slope at $x=L$ is the same as without $k$, satisfying the boundary condition. Overall displacements decrease as $x$ decreases due to the load taken up by the elastic supports along the pile diameter. The total displacements (e.g., $u(x=L)$) are lower due to the increased stiffness of the system.
Task 3: Investigate the influence of discretization on the quality of the solution
- How many elements do you need to get a good solution?
- How about when the stiffness of the distributed support is increased to $k=10^6$ N/$m^2$
x10, u3_10 = simulate(10, 1.e3)
x5, u3_5 = simulate(5, 1.e3)
x2, u3_2 = simulate(2, 1.e3)
plt.plot(x2, u3_2, label='ne=2')
plt.plot(x5, u3_5, label='ne=5')
plt.plot(x10, u3_10, label='ne=10')
plt.xlabel('x')
plt.ylabel('u')
plt.title('k=1000')
plt.legend();
plt.figure()
x5, u6_5 = simulate(5, 1.e6)
x20, u6_20 = simulate(20, 1.e6)
x100, u6_100 = simulate(100, 1.e6)
plt.plot(x5, u6_5, label='ne=5')
plt.plot(x20, u6_20, label='ne=20')
plt.plot(x100, u6_100, label='ne=100')
plt.xlabel('x')
plt.ylabel('u')
plt.title('k=10^6')
plt.legend();
With $k=1000$, the solution is already quite accurate with 5 elements and even smoother with 10 elements, while with $k=10^6$, the solution with 20 elements is still poor. Here something between 20 to 100 elements is needed for a smooth solution. The reason is that there is a very small region with high gradients in the solution with $k=10^6$, which requires a fine mesh to be resolved.
